Aircraft Moments and Rotation
Introduction
An aircraft
is an example of a somewhat symmetrical object that has three principal axes of
rotation, pitch, roll, and yaw. Since
the wings and fuselage masses usually lie in almost the same plane, it can be
modeled with reasonable accuracy as a planar object. The advantage of doing this is that the yaw
moment becomes a simple sum of the pitch and roll moments and all three axes of
rotation pass through the center of mass (CM) which usually lies at about 30%
of the wing chord behind the wing leading edge. A simplified diagram of the
masses and CM location is shown below.
Figures
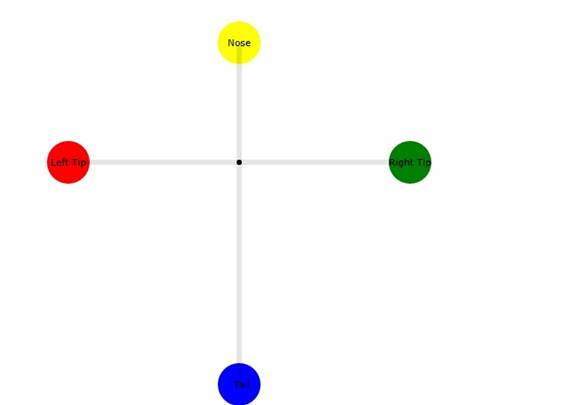
Figure 1: Showing the aircraft modeled as 4 spherical
masses. The wingtips, nose, and tail are
labeled. The black dot is the center of
mass, so the tail sphere has to have less mass than the nose sphere.
Moments of Inertia
These will
be labeled IP, IR, and IY where the subscripts
stand for pitch, yaw, and roll, respectively.
To define them we first need to compute the nose and tail masses from
the center of mass location. If the CM
is located at a fraction Cg from the nose, then the ratio of the
nose to tail mass is:
|
|
|
(1.1)
|
If the sum of the nose and tail masses (fuselage mass) is Mf
then the nose and tail masses are:
|
|
|
(1.2)
|
Since all the nose and tail weights are concentrated in two
small spheres, the pitch moment of inertia about the CM is:
|
|
|
(1.3)
|
where the fuselage length is lf. The above equation makes sense since for Cg=1/2,
and lf =2l, then we would have I=Mfl2 as expected for small
masses located at distance l from the
CM.
The roll moment of inertia is:
|
|
|
(1.4)
|
where Mw is the total mass of the wings and lw is the wingspan.
Since we have a planar object, the yaw moment of inertia is
just the sum of the pitch and roll moments:
|
|
|
(1.5)
|