The Best Trajectory to Negotiate a Turn in the Road
Introduction
This
animation will show the resulting lateral accelerations for two types of
curve. First is the ideal curve that is
the largest one that can stay within the bounds of the lane. Second is a curve that is adjustable by the
user. For both types of curve, the speed
profile is adjustable via a smooth Bezier curve. We will also discuss a trajectory that is safer
than the ideal curve.
Figures
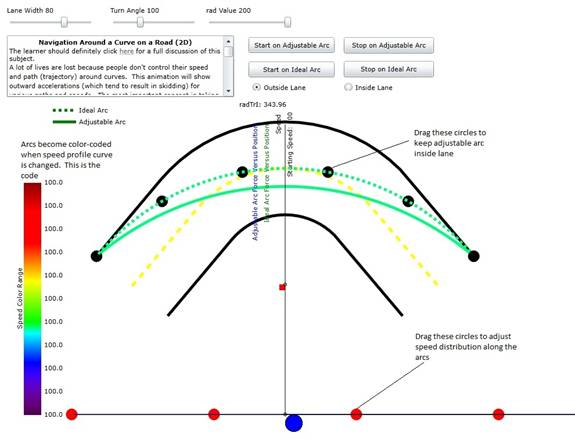
Figure 1: Diagram of the animation describing how to
use the adjustable arc and speed profile.
Computing the ideal arc
Figure 2: Diagram of the turn outer boundary and the
possible trajectory. Symbol a is half of
the total turn angle while symbol s is the straight line distance from the
start of the curved trajectory to the start of the arc that represents the
outer boundary of the road. as can be
seen, the parameter dr is the difference between the trajectory radius and the
road outer bound radius.
It is obvious from the figure that the value of dr is:
|
|
|
(1.5)
|
Also the lane width, w, is
|
|
|
(1.6)
|
From equation (1.6)
we may compute s in terms of w and a:
|
|
|
(1.7)
|
and from equations 1.5 and 1.7 we can compute dr:
|
|
|
(1.8)
|
Computing the Lateral Acceleration
I assume we have a parametric path in 2D space:
|
|
|
(1.1)
|
where i is the counter integer for successive points,
what is the transverse acceleration
needed to stay on the path?
The transverse acceleration depends on the rate of change of
the vector normal to the path. If we
just have a listing of then we can make an estimate of the change of
the unit normal, n, by taking the
following quantities:
First the local normal is computed from:
|
|
|
(1.2)
|
where x0
and y0 are immediately
previous values of x,y and x and y are the present values. In
order to compute the change in normal vector we need to have saved an
immediately previous value of n as n0
Then
|
|
|
(1.3)
|
is the local change.
The acceleration a normal to
the path then is
|
|
|
(1.4)
|
where ds is the spacing along the path of the points and dt
is the time increment between points.
Please take note that it is not
assumed that the curve is part of a circle.
A Safer Trajectory: 2/3-1/3 rule
It is usually safe enough to start the turn at the outer bound
of the lane. But t is not safe to exit at
the outer bound. For that reason the two
third-one third rule is suggested. To follow
this rule, the operator hits the apex when he/she has completed 2/3 of the angle
of the curve. That means that he/she can
exit the turn in the middle of the lane rather than the outside of the lane as shown
in Figure 3. This leaves a safety margin
in case the exit is blocked by other traffic or debris.
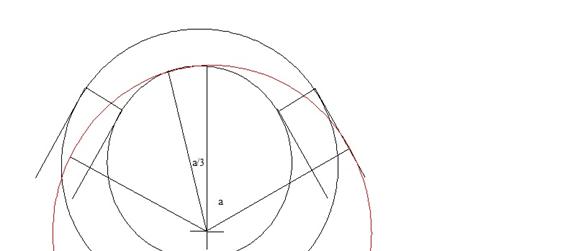
Figure 3: The entry to the curve is at the right and
the exit is at the left.
The red curve is the trajectory that agrees with the 2/3-1/3
rule.