Levitation of a Cylindrical Magnet
Using Diamagnetic Material
Introduction
Almost everyone
who has handled 2 magnets knows that one magnet will lift the other against
Earth's gravity if the closest end poles are of the opposite type (i.e. one is
North and the other is South) and the pole spacing distance is small enough. But those same people know that the spacing
where magnet 1 just barely supports magnet 2 is extremely unstable. If the lower magnet is brought to that point
and then let go, it either falls to the floor or it violently collides with the
attracting pole of the upper magnet.
Diamagnetism gives us a way around this dilemma. Diamagnetism creates a weak opposing force
which depends on the speed toward the diamagnetic slab (DS). Thus, any lifted magnet motion toward the
slab is usually slowed to zero speed before it collides with the slab. If the lifted magnet (LM) is placed between
two horizontally oriented slabs, both the motion toward the upper magnet and
the motion toward the floor are retarded.
The spacing between the slabs is determined by their diamagnetism whish
is really dependent in their electrical conductivity in the horizontal
plane. The diamagnetism handles the
stability in the vertical direction.
Once that is done, the lifted magnet is also stable in the radial
direction since there is always a small inward radial force between magnets that
are almost aligned on their axes.
Calculation of Dynamic Forces on Levitated Magnet of Diamagnetic Slabs.
What we have is the levitated magnet with its axis aligned
the vertical direction and it moves either up or down along the vertical
direction. When it moves toward a DS, all of the electrons in the DS
feel an additional force
|
|
|
(1.1)
|
where q is the electron charge, v is the velocity of the magnet with respect to the DS and B is the local field in the DS. Since v has only a z component, and B has no circumferential component, the
cross product becomes
(1.2)
where Br is the radial component of the magnetic
field due to the LM and where represents the circumferential direction. We can interpret vzBr
as the magnitude of an electric field in the direction.
Then we can write the current density due to the motion of the LM toward
the DS as
(1.3)
where σ is the electrical conductivity of the DS.
We can integrate over this current density to obtain a
magnetic field that opposes that of the LM.
But, more simply, we can use the following equation to directly obtain
the force that the DS applies to the LM.
The basic expression for a small force element on a current carrying
wire due to an external magnetic field, B,
is:
|
|
|
(1.4)
|
where i is the
current in the wire and δl is length of the segment of
wire under discussion For our case points δl points along the J (or direction). The
cross product in equation (1.4) has two possible
components, a radial component due to Bz and an axial (z) component
due to Br. The radial component can only slightly change
the orbit radius of the electrons which are already strongly rotating due to
the static Bz. It is the
axial component due to Br that will result in the repulsion of the
plate or magnet as they approach each other.
To get the total repulsion force, we have to convert the current i to an integral over J and integrate
over δl.
The latter integral is easy since all the electrons are orbiting around
the magnet axis
|
|
|
(1.5)
|
To convert i to a
current density we must take a small differential area around the point (r,z)
|
|
|
(1.6)
|
Then the expression for the total repulsive force becomes:
|
|
|
(1.7)
|
where the integration is over the full thickness and radius
of the slab.
If instead, we want the force element at coordinates (r,z)
for a single ring of the DS in order to make a contour plot of these elements,
that force element is:
|
|
|
(1.8)
|
Equations of Motion
The dynamic
and static forces discussed in the previous section would be enough to describe
the position and speed of a small magnet that has no mass. However, since real magnets have mass and
therefore momentum, the latter has to be taken into account for computing the
position of the magnet versus time. The
equation of motion is
|
|
|
(1.9)
|
where m is the magnet mass, b is the coefficient of the
dynamic forces due to the eddy currents, g is the (downward) acceleration of
gravity, k is the coefficient of the slope of the static forces on the magnet
and z0 is the "neutral" height where the small magnet
would have no motion. From the
definitions above, we can write:
|
|
|
(1.10)
|
and equation (1.9)
becomes:
|
|
|
(1.11)
|
For a more complete description let's assume that a
sinusoidally varying force due to a small coil drives the levitated magnet up
and down around its neutral position just as in the animation. (Otherwise we could assume that the LM
suffers a small upward or downward force impulse.) Then equation (1.11)
becomes:
|
|
|
(1.12)
|
We solve equation (1.12)
by the assumption
|
|
|
(1.13)
|
where za is the (presently unknown) complex
amplitude of the motion and ω is its radian frequency and t is time.
Substituting equation (1.13)
into (1.12)
we have the following:
|
|
|
(1.14)
|
The solution for za is:
|
|
|
(1.15)
|
Then using equation (1.15)
in (1.13)
we have:
|
|
|
(1.16)
|
Caveat:
Equation (1.16) is a simplified
version of the actual motion. The
problem is that, even for small displacements from equlibrium, z0, k
is a significant function of z and so is b.
That changes this problem from being a simple harmonic oscillator into
an anharmonic oscillator. And that is
beyond the scope of the present document.
Figures
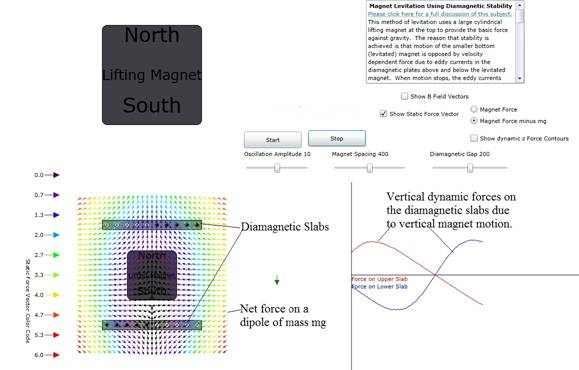
Figure 1: showing the entire animation with all
options.
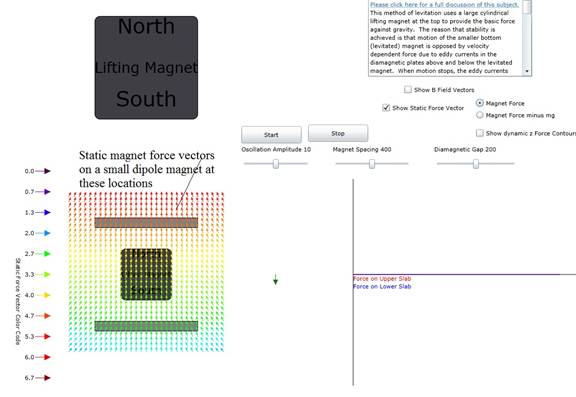
Figure 2: Static magnet force vectors on small dipoles
located at the root of the arrows.
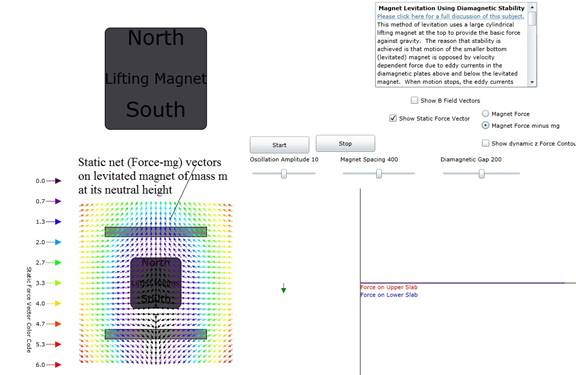
Figure 3 Static magnetic force vectors after subtracting
off the force on gravity on a small magnet.
Note that the arrows are violet at the center of the magnet since this
shows its neutral levitated position.
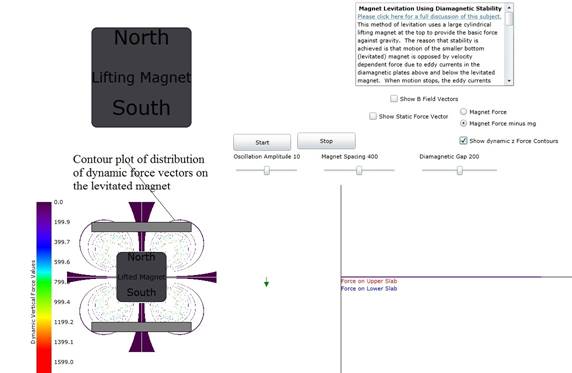
Figure 4: Dynamic z force contour plot, assuming a
constant magnet z velocity, at points where a diamagnetic material may be
located.
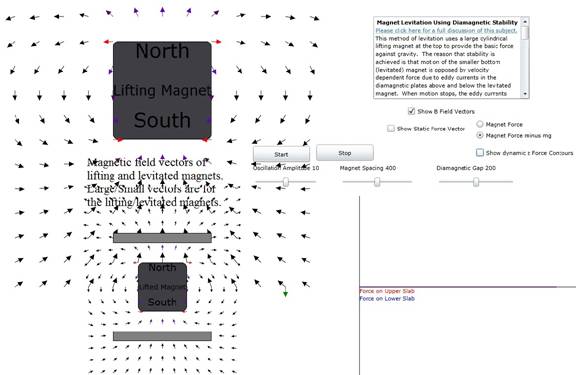
Figure 5: Static magnetic field vector plot for both
lifting and levitated magnet. The color
code is the same as that for Figure 3.