Response of a 2D Fixed Rotor
to a Disc Collision
Introduction
In order to
simulate behavior of materials which have magnetic dipoles (modeled as rigid
rotors) that are fixed in position inside, we need to compute the final rotor
angular rotation rate after a collision with a disc as well as the final
velocity of the disc. That calculation
is performed in section 2. In section 1,
as a warm up, the response of a rotor to a known impulse is computed.
1. Response of a Stationary Rotor to an Impulse Applied to One of Its End
Masses
The basic
driver involved in hard object collisions is an impulse. An impulse is the product of a force times a
very small time increment which, of course, leads to a change in momentum like
mδv where m is the mass and δv is the change in the velocity. The time increment is small enough that there
will be no significant rotation of the rotor or displacement of its center of
mass within the duration of the impulse.
These motions will occur after
the impulse.
The
specific diagram for this problem is shown below. To make the problem primitive and simple,
both of the initial motions are nil. The final motion will be a combination of
a center of mass velocity, δvx,
and a final rotation, at rate δω,
about the center of mass. The impulse
is along the -x direction as shown.
The rotor's rotation speed changes by δω.
Here Px is the
impulse Fxdt; Note that Px
is negative:
|
|
|
(1.1)
|
Solving for δω:
|
|
|
(1.2)
|
The energy supplied by the impulse is Fxdx which
is the same as Px<vx> where <vx>
is the 1/2 of the final tangential speed that will be obtained by the rotor.
Thus conservation of energy requires that:
|
|
|
(1.3)
|
The solution for δω is:
|
|
|
(1.4)
|
2. Stationary Rotor-Disc Collisions
These are
similar to hard disc collisions in terms of the momentum transfer. However, the initial and final velocities
of each rotor end is a combination of
the center of mass (CM) velocities and the rotational velocities. Therefore the momentum changes due to both of
these incident velocities have to be equal and opposite to that of the disc and
the total energy due to both types of rotor velocity as well as that of the
disc has to be the same before and after the collision. For the time being we will limit ourselves to
two dimensions (x,y). We can state the r and v vectors in terms of the (x,y) coordinate system and the z axis
will be the rotation axis.
|
|
|
(1.5)
|
where subscript p denotes one end (think positive) and n
denotes the other end of the rotor, ω is the rotation speed of the rotor, l is half the distance between the rotor
ends and a is the angle with respect to the x axis of the rotor's
orientation. So the program must check
the distances between both the p and the n ends of each rotor and the center of
the disc. If this distance is less than
or equal to the sum of the radius of the rotor end disc and that of the free
disc, then a collision must be calculated.
Just as in the case of the hard discs, the momentum transfers must be
equal and opposite. However, unlike that
case, the momentum transferred to the fixed
rotor will be just its rotational speed changes.
Figure 1: Illustration of rotor and a disc. The rotor rotational angle with respect to
the x axis is a and rotor center of mass velocity vr
The distance between the centers of the rotor end
discs is 2l and the radius of the end discs is br while the single
disc radius is bd Thus a collision is computed when the distance
between disc center and either rotor end center is less than br+bd. u is a unit vector along the length of
the rotor, vω is a unit vector along the rotational
velocity vector of the red end, and c is a unit vector along the line from
the center of the disc to the red end of the rotor.
The impulse felt by the disc is along the central vector -c so its velocity change will
be along that direction also and we will assign the value δv to the magnitude of that velocity
change. This results in a new value of
kinetic energy of the disc:
|
|
|
(1.6)
|
as well as a new momentum
|
|
|
(1.7)
|
In the collision, linear momentum is not conserved because
the rotor center is fixed but angular momentum about the center (rotation axis)
of the rotor does have to be conserved.
The initial angular momentum of the disc is
|
|
|
(1.8)
|
and the initial angular momentum of the rotor is
|
|
|
(1.9)
|
and of course both of these angular momenta are along the z
direction. The angular momentum of the
disc gets changed to
|
|
|
(1.10)
|
and the angular momentum of the rotor becomes:
|
|
|
(1.11)
|
The total angular momentum after the collision must be equal
to that before the collision and therefore :
|
|
|
(1.12)
|
The total change in kinetic energy of the disc and rotor has
to equal zero and therefore we have
|
|
|
(1.13)
|
We can solve equations (1.12)
and (1.13)
for both δω and δv.
First simplifying the notation for δω we have:
|
|
|
(1.14)
|
In the next 4 lines we solve for δv
|
|
|
(1.15)
|
and then we can insert the value of a and solve for δω:
:
|
|
|
(1.16)
|
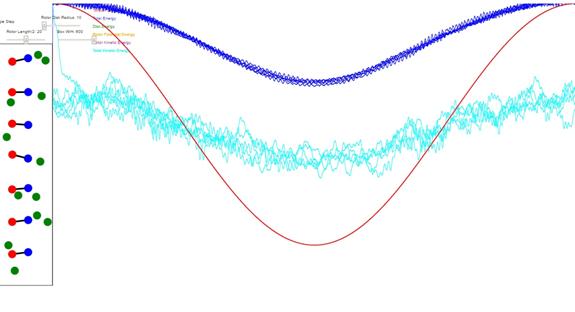
Figure 1: Results of a 2D animation of a magnetization
cycle. Red is the magnetic field, blue
is the total energy including magnetic potential energy, and cyan is the
kinetic energy. While the magnetic field
is high, kinetic energy can be reduced
by cooling gases outside the container.
When the magnetic field is reduced, the kinetic energy is reduced and
the container is placed in thermal contact with the volume which is desired to
be cooled.