Homopolar Motor Animation
Introduction
A homopolar
motor has only three parts:
1. A cylindrical dry cell battery
2. A strong magnet positioned along the axis of the battery
3. A non-magnetic (e.g. copper) wire forming the armature
The wire is formed so that it conducts current from the top
battery terminal to the bottom terminal by rubbing against the magnets which
are in contact with the bottom terminal.
Figure 1 from the animation is a good diagram of the parts.
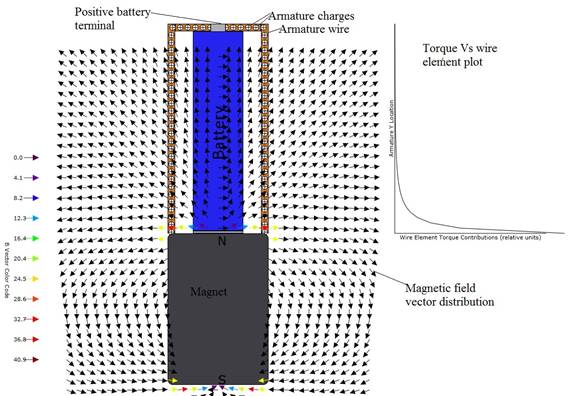
Figure 1: Diagram of the parts of the homopolar motor. Note that the torque contribution Vs position
on the armature is plotted.
Physics
To compute
the torque on the armature, the magnetic induction (field) B for an extended permanent magnet must first be computed. This was done with the help of some integral
equations from a Mathematica demonstration.
The radial, ρ, and axial, z, components of the field
are found from the following integrals:
(1.1)
(1.2)
The contribution
to the torque from a short element, dz. of the armature wire is:
|
|
|
(1.3)
|
where ra is the radial
vector from the magnet axis to the armature, i is the battery current, dl
is the element of armature length, and B
is the magnetic induction vector.
The total torque about the armature axis is twice the sum of
all the contributions from equation (1.3).