Animation of Pulleys and Belt
Drive System
Introduction
This
animation provides learning of drive speed ratios and the dynamics of how the
driven load affects the driving belt's sag.
Its design algorithms also show how to maintain digital integrity of the
links of the belt without slippage on the pulleys.
Figures
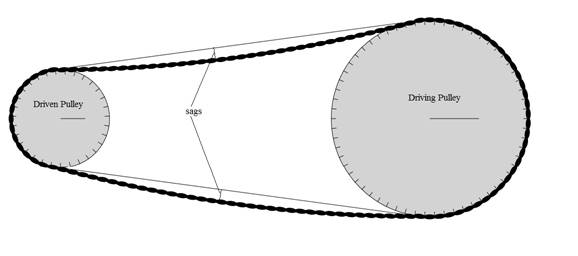
Figure 1.
Pulleys with belt under motionless conditions.
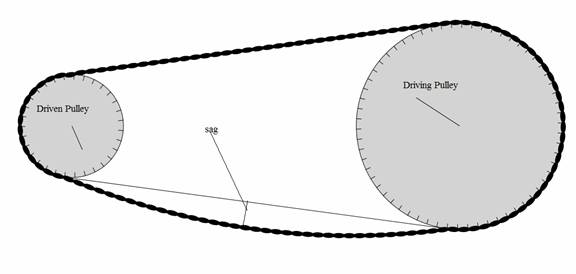
Figure 2.
Pulleys with belt under driving conditions. Note the lack of sag on the belt's top span
and the doubling of sag on the belt's bottom span.
Math
1. Initial Layout:
We will make integer numbers of equal length links on both free spans and on
both pulleys by adjusting start angles on the left and right pulleys and by
adjusting the horizontal distance between the pulleys. In order to get integer numbers of links on
the pulleys we use the following algorithm:
|
|
|
(1.1)
|
where l is the
link length, ab is the radius of the big pulley and as is
the radius of the small pulley.
Then we solve the equations (1.1)
for θb and θs:
|
|
|
(1.2)
|
The math for the span between pulleys involves a quadratic
equation:
|
|
|
(1.3)
|
where δxp is the horizontal distance
from the center of the small pulley to the center of the big pulley and nsp
is the previously chosen number of links in the free spans.
2. Motion:
Here the idea is to save a copy of the stationary belt and
then have the moving belt segment morph gradually
into the stationary segment as it arrives there. In order to achieve this, it
is simpler to save several iterations of each link position in an array so that
the link can be stepped sequentially to an exact and repetitive position.
The code to move a single segment along the belt path is
shown below where i represents the integral link step number, n is the total
number of links, m is the number of the current link being advanced, j is the
discrete step number and there are njs steps for each full link advancement.
//i is the current value of advancement;
int k= i % n;
//advance all ellipses by len/njs from their stored positions
for(int m=0;m<n;m++)
{//m is the link number being advanced
int kmMod=(k+m) % n;
ellipse
em=eList[m];
int index=njs*kmMod+j % njs;//2D data array, pA, index
em.x=pA[index][0];
em.y=pA[index][1];
em.angle=pA[index][2];
}
j++;
if(j % njs==0) i++;