Cylinder on an Inclined Plane
Introduction
The
acceleration of a cylinder that rolls on an inclined plane is generally
considerably less than that of a similar mass that slides without friction on
the same plane. The reason for this
difference is that rolling mass has more inertia than the sliding mass due to
the need to accelerate both its rolling speed and its center of mass
motion. This animation will allow the
viewer to see the variation of the acceleration due to changing the mass
distribution of the cylinder.
Figures
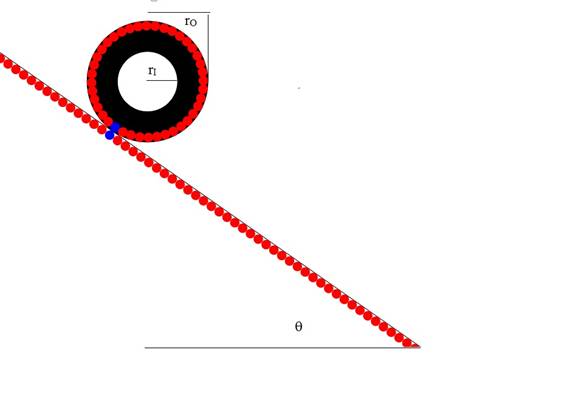
Figure 1. Cylinder rolling on a plane inclined at
angle θ from the horizontal. Inner and outer radius are labeled.
Physics of Rolling Cylinder
The
cylinder is accelerated angularly by application of a force, F, at the point of contact on the
plane. The force results in a torque, T, about the center of mass of the
cylinder. The torque is defined as:
|
|
|
(1.1)
|
where r is the radius of the cylinder and the x symbol
denotes cross product.
Since the mass rolls without slipping, its center of mass
moves at speed
|
|
|
(1.2)
|
where ω is the angular rate of rotation (radians sec-1).
The cylinder center of mass (its axis) is accelerated at the
rate:
|
|
|
(1.3)
|
where the dot over the ω denotes time derivative.
Even if there were no center of mass motion, all of the
masses in the cylinder also have to be accelerated and rotate at ω. The inertia (i.e. resistance to rotation) of
these depend on their radial location.
The relation between rotational acceleration and applied torque obeys
the following equation:
|
|
|
(1.4)
|
where the angular moment of inertial, I, is defined as (see
Appendix below):
|
|
|
(1.5)
|
where RI, RO are the inner and outer
radius and dm(r) is the incremental
mass at radius r. For a cylinder dm(r)
is defined as
|
|
|
(1.6)
|
where ρ is the mass per unit volume and L is the axial
length of the cylinder.
Inserting equation (1.6)
into equation (1.5)
and integrating over r we obtain:
|
|
|
(1.7)
|
By performing a similar integral we obtain the total mass of
the cylinder:
|
|
|
(1.8)
|
Dividing equation (1.7)
by equation (1.8)
we obtain the simplified result:
|
|
|
(1.9)
|
It should be noted that equation (1.9)
is valid only for cases where the density, ρ,
remains constant between RI and RO. Note that I can vary from MRO2/2 (solid
cylinder) to MRO2
(hoop) as rI varies from 0
to rO.
In addition to the angular inertia, we have to include the
inertia associated with the center of mass's motion. That component is
|
|
|
(1.10)
|
Then the total inertial moment is:
|
|
|
(1.11)
|
Note that Itotal can vary from 3MRO2/2 (solid
cylinder) to 2MRO2
(hoop) as rI varies from 0
to rO.
We should also compute the torque available due to an
inclined plane. If the plane's angle
with the horizontal is θ then the torque is
|
|
|
(1.12)
|
where g is the acceleration of gravity.
Then the angular acceleration is
|
|
|
(1.13)
|
On many
machines, the rolling mass is connected to a much larger non-rolling mass. An example would be the wheel on a
bicycle. One might consider the question
of the effect on acceleration of adding/removing mass to/from the rolling part
as compared to a similar effect on the non-rolling part. Looking at equation (1.11),
if the mass is added or removed near rO of the roller so that rI
is approximately equal to rO , then its effect on inertia is
twice as much as if the mass is added or removed from the non-rolling part
i.e.:
|
|
|
(1.14)
|
Appendix: Torque required to accelerate the angular rate of a mass at
radius r
It is well
understand that the force required to linearly accelerate a mass follows Newton's
law of motion:
|
|
|
(1.15)
|
The force required to change the angular rate of a mass at
radius r is then:
|
|
|
(1.16)
|
Since we want to have the torque corresponding to this force
we multiply both sides of the equation by the radius, r.
|
|
|
(1.17)
|
Equation (1.17) can be thought of as
the reaction torque that resists applied torques of the opposite sense.